
『運動学習』とは、理学療法士や作業療法士の方をはじめ医療に携わる多くの皆様が一度は耳にしたことがある単語だと思います。
しかし一方で、『運動学習』と一言で言ってもその中に含まれる概念や考え方は少し難しく、教科書や論文を読んでも理解しきれないという方は多いのではないでしょうか?
そこで、この記事では…
- 運動学習について基礎から知りたい!
- 運動学習のうち「教師あり学習」って何?
- 運動学習の理論をどのように臨床で活かすの?
という、これらの疑問について丁寧に分かりやすく解説していきます。
これを読めば、運動学習(教師あり学習)についてはしっかり理解できると思いますので、ぜひ最後までご覧ください。
運動学習のメカニズムを分かりやすく解説~教師あり学習~
『運動学習』種類が3つある
さて、まずは皆さんに質問です。
皆さん、運動学習には3種類あるということをご存知でしょうか?
「知らなかった!」という方はぜひ今回それを覚えていってくださいね。
その3つとは『教師あり学習』『強化学習』『教師なし学習』です。
どれもとても重要なのですが、この回では『教師あり学習』にスポットを当てて、解説していきたいと思います。
『教師あり学習』とは

教師あり学習とは、運動中に生じた誤差情報をフィードバック信号としてその誤差を修正していく学習パターンです。
 セラピスト
セラピスト誤差情報…?フィードバック信号…?ナニソレ
少し噛み砕いて説明すると要はこんな感じです。
- 常に運動を監視してくれる先生がいる(誰なのかはこの後説明)
- 運動を行って上手くいかなかった場合、そのヒント(誤差情報)を先生が教えてくれる(フィードバック)
- これを繰り返すことで運動が習熟していく
“教師”というのは、このフィードバック信号のことを指していて、私たちの脳内でこの先生役を担っているのは誰か?
というと、“小脳”がこれにあたります。
実行した運動が失敗した場合に、『間違えたよー』と、小脳が教師役となり大脳皮質にフィードバックを与えてくれるわけです。
運動学習初期には、この失敗が多く生じるため沢山の誤差情報がフィードバック信号として中枢に帰結しますが、徐々に運動が習熟するにつれて、その誤差が減少していきます。
これを『フィードバック誤差学習』といいます。
なぜ、人はこのように運動を繰り返すことで誤差が減少し習熟していくかというと、この運動が習熟していく段階で脳の中に『内部モデル』というものが形成されているからです。
実は、教師あり学習における1番の目的はこの『内部モデル』を構築することにあります。
内部モデルとは
内部モデルとは、運動学習によって獲得した運動記憶のことです。
運動が習熟してくると、この内部モデルを参照して身体運動を行うことにより、洗練され自動化した運動が可能となります。
イメージしやすくするために少し例をだすと、熟練したアスリートの身体の使い方というのは、柔らかく無駄な力が抜けている事が多いですが、逆に運動を始めた初期(学習初期)というのは、非常にぎこちなく(いわゆるfreezing)try&errorを繰り返す様相を呈するかと思います。
前者は、繰り返し運動を繰り返したことで『内部モデル』を構築し運動が自動化されていますが、後者はまだ内部モデルが構築されておらず、try&errorを繰り返している状態です。
また、より具体的に運動学習初期と運動学習後期の違いを見てみると、運動学習初期では、内部モデルが構成されていないので、主に『感覚フィードバック』を頼りにしながら、実行した運動に対するエラーを逐一参照して運動を修正します。
リアルタイムで運動を遂行していく場合、毎回フィードバック情報を参照して運動を遂行していくと時間的な遅れが生じてしまいます。
これが、『筋緊張の増加』や『関節のスティフネス』といったようないわゆる『動きの固さ』を生み出している原因になります。
一方、運動学習後期において『内部モデル』が構築されてくると、今までフィードバック情報を頼りに運動を行っていたのに対して、『予測』が出来始めてくることから、『フィードフォワード』の要素が加わった運動の遂行が可能になってきます。
その結果、学習初期に見られていた『動きの固さ』が減少し、滑らかな自動化された運動が行えるようになります。
これらを踏まえ、リハビリテーションに置き換えて考えてみると、多くのセラピストはリハビリテーションを行う際に、『筋緊張亢進』や『スティフネスの増強』などといった現象はあまり思わしくないと考える傾向が強いです。
しかし、ここまで見てきたように運動学習の過程で考えると、特に学習初期というのは案外必然的にこのような現象(筋緊張亢進やスティフネスの増強)は起こりうる事象であるため、それほどネガティブなものとして捉えなくてもいいのかもしれません。→運動学習が進むにつれて過剰な筋緊張は緩和してくる可能性がある
順モデルと逆モデル
次に、内部モデルの詳細についてもう少し詳しくみていきたいと思います。
実は、内部モデルは2種類のモデルで構成されており、それが『順モデル』と『逆モデル』というものです。
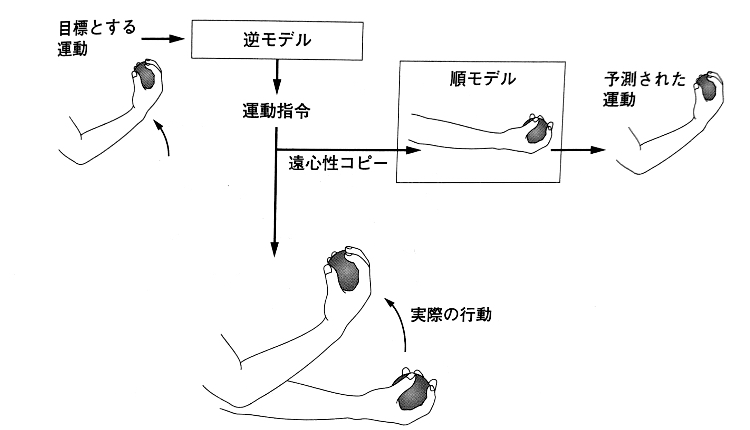
順モデル
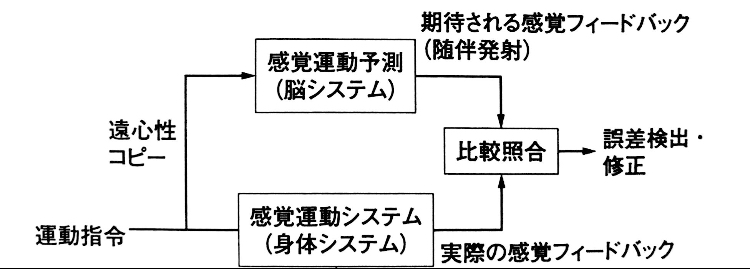
順モデルは例えば、目の前の道具の操作に関して、どのような操作をすればどのような感覚結果が得られるかを脳内で予測する機能であり、これはcomparator modelでいうならば、『遠心性コピー』に当たる部分です。

逆モデル
一方逆モデルは、順モデルの前段階で、そもそも目標としている運動を遂行するための運動司令を決定することです。
逆モデルがあれば、はじめから正解を知って運動指令を決定できるため、フィードバック情報に頼らずとも、フィードフォワード制御にて運動を遂行することが可能になります。
臨床にて内部モデルを構築するために必要な考え方

内部モデルは、予測に基いた感覚フィードバックとの比較照合(try&error)の繰り返しによって構築されます。
この事実に基づくならば、ただ闇雲に反復運動を行わせてもだめで、運動学習を行う対象者本人が運動を予測し、その予測に対して帰結した感覚フィードバックがどうだったのかという比較照合作業を行わなければなりません。
運動の予測とはつまり、『運動イメージ』のことであるため、リハビリテーション介入においてはこの『運動イメージ』がとりわけ大事な要素になってきます。
仮に、運動の予測なしに実際の運動を遂行したらどうなるかというと、運動実行により感覚フィードバックが帰結しても基準とするものとの比較照合が行えないため、そもそも教師あり学習が行えません。
つまり、実際の運動にエラーが生じているか否かは、『予測(運動イメージ)』という比較対象がなければ成立しないのです。
では、この『予測する』ということを可能にするために必要なことはなにか。
それが、対象者の注意や志向性です。
患者様が意識を向けている対象
ここで、皆さんの日々の臨床を思い出していただきたいのですが…
「ROM訓練や筋力増強訓練といわれるものを行う際、対象者の意識や注意はどこにあるでしょうか?」
運動学習を行う際、本人の意図や志向性が自分自身の運動に向けられていなければ、当然『学習』は行えません。
よって、リハビリテーションを進めて行く上でとても大切なこと。それは、いかに対象者の能動性(やる気など)を引き出すか。
このスキルは私達とってとても重要な手続きになるのではないかと思います。
教師あり学習まとめ
さて以上が、運動学習(教師あり学習)の概念と臨床における応用の仕方についてでした。
今回は、『教師あり学習』のみの解説を行いましたが、この他に『教師なし学習』や『強化学習』と言われるものもあります。
このうち『強化学習』についてを以下の記事で解説していますのでご興味ある方はこちらをご覧ください。

コメント
コメント一覧 (2件)
初めまして、西 学と申します。
この運動指令から比較照合の図が大変見やすいのですが、この原著論文などが分かりましたら教えていただけますでしょうか?
何か英文などから編集をされている図なのでしょうか?
出所が知りたくご連絡させていただきました。
色々調べてみましたが、いつもきんたろーさまのブログでヒットして他では検索が引っかかりませんでした。
よろしくお願いいたします。
西様、コメントありがとうございます。
おそらくコンパレーターモデルの図でないかと思うのですが、こちらかなり前に作成した記事になりまして、当時の記憶が定かではないのですが…(引用元を付けてない私がアウトです)
森岡周先生の論文もしくは参考書から引用させて頂いた記憶があります。ただ、どの論文だったかというのが曖昧で、、、申し訳ございません。