さて、今回解説していくテーマは『歩行』です。
これまで歩行に関する記事は、神経学的な部分からの視点が多かったですが今回は少し切り口を変えて、“進化論”と言う視点から、ヒトの『歩行』について考えてみようと思います。
本日参考にさせていただいた論文はこちら
『姿勢と歩行の成り立ちと運動制御 石井慎一郎 PTジャーナル第49巻第1号2015/1』
進化論から考える直立二足歩行の成り立ち
直立二足歩行とは?~サルとヒトの歩行様式の違い~
 先生
先生地球上には多くの生物が存在しているが、その中で直立二足歩行が可能な生物というのはどの生物か分かるかな?
 セラピスト
セラピストえーっと。直立二足歩行ですか…うーん。サルとか人間…ですかね?
先生うーん、惜しいのう。実は、現在地球上に存在する生物の中で直立二足歩行が可能な動物というのはヒトだけなんじゃ。
セラピストえ?サルは入らないんですか?
先生うむ。サルも二足歩行を行う動物ではあるが、『直立』ではないんじゃ。これ屁理屈のように聞こえるかもしれんが、すごく重要なポイントなんじゃ。
直立二足歩行とは?
直立二足歩行とは、脚と脊椎を垂直に立てて行う二足歩行のことである
『Wikipediaより引用』
と定義されています。この文章にある様に直立二足歩行では、脚と脊椎が垂直になっていることがポイントです。
サルやチンパンジー、ゴリラなど、ヒトの祖先ともいわれる動物も後脚を使って二足歩行を行うことがありますが、その姿勢をよく見てみるとこのようになっています。
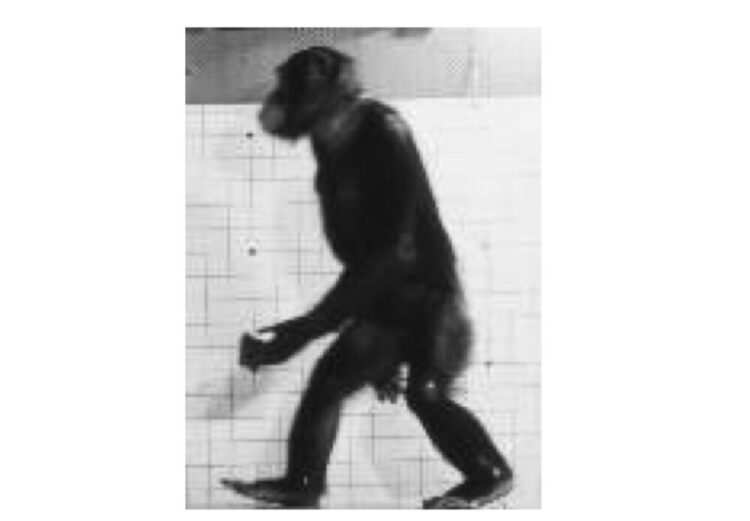
二足歩行を行っている時のサルの姿勢は胴(脊椎)がヒトのように地面に対して垂直ではなく、常に前に傾いています。
また、それにより股関節も常に屈曲位となっているため、ヒトの歩行周期でいう立脚後期~遊脚初期にかけて股関節が伸展するフェーズがサルにはありません。膝関節も同様で、常に屈曲位となった状態で体重を支持しています。
これらの事実から、ヒト以外の霊長類に分類される動物も確かに二足歩行は行っていますが、『直立』とは言えないのです。よって、直立二足歩行とはヒトのみが行っている移動様式ということが言えます。

ヒトはなぜ直立二足歩行を選んだのか
現在、地球上に存在する多くの生物が移動様式として選択しているのは『四足歩行』です。
ヒトも元々は四足歩行を行っていた動物のはずですが、進化の過程でみんなが行っている四足歩行を捨てて、『直立二足歩行』という新たな移動様式を獲得したのです。
さて…以上の話しを踏まえると、こんな疑問がポンポンと出てきます。
Q.なぜヒトは、みんなが行っている移動様式を捨ててまで直立二足歩行を獲得したのだろう?
Q.ヒト以外の霊長類(サル・チンパンジー・ゴリラ等)が行っている二足歩行ではだめなの?
Q.なぜヒト以外の動物は直立二足歩行を選択しないのだろうか。
次からは、この疑問に答えていこうと思います。
直立二足歩行が選ばれない理由
『直立二足歩行』が選ばれない理由。それはいたってシンプルな答えです。
結論から先に述べると、答えは…
『不安定』だからです。
セラピスト不安定って抽象的過ぎませんか?具体的にどんな要素が不安定性を生み出しているの?
具体的にどのような点が不安定性を生み出しているのか。この質問に答えるためにちょっと問題をつくってみました。
次の文章の( )に当てはまる語句を考えてみてください。
二本足で立つことと四本足で立つこと、支持基底面が広いのは( )である。
四本足の立位状態から二本足で直立化すると重心の位置は( 高 or 低 )くなる。
さあ、答えは出たでしょうか?
正解はこちら。
二本足で立つことと四本足で立つこと、支持基底面が広いのは(四本足)である。
四本足の立位状態から二本足で直立化すると重心の位置は( 高 )くなる。
これが、不安定性を生み出している最大の原因になります。一つずつ解説していくと、二本足で体重を支えるよりも、四本足で体重を支える方が支持基底面は大きく広がるため安定性は二本足に比べ、四本足の方が遥かに高いです。
また『直立化』をするということは、図のように四つ足に比べて重心の位置は高くなります。

『支持基底面が狭いうえに重心が高くなる』と、もはや『不安定性』を自分から買いに行っているようなものともいえますね…
そして、不安定性が増すとそれに応じて高くなるリスクがあります。そのリスクとは『転倒』です。
弱肉強食である自然環境の中で『転倒リスクが高い』ということは、どういうことか分かりますか?
例えば自分が捕食者に追われているとして、そんな時に転倒なんてしたらどうなりますか?
一発でアウトです。(食べられます)

このように、転倒リスクが高いことは、自然環境の中で生きる上ではデメリットしかなく、その種の生存に関わってくる大問題を背負うというのが直立二足歩行なのです。つまり、ヒト以外の生物が『直立化』を選択しない理由。それは…
 セラピスト
セラピストコケたらどうするんだよ。捕食されるだろーが。
と言う風に考えられているそうです。と、なるとさらに…
セラピストなんで転倒のリスクを背負ってまで『直立化』を選んだの?
となっちゃいそうです。それを考えるには、先ほどの致命的なデメリットを凌駕するようなメリットがなければ到底採用できません。
では、直立化することのメリットって何でしょうか。次はそれを考えてみようと思います。
直立二足歩行とエネルギー効率
歩行の動作分析を行っている教科書などでよく見ますが、直立二足歩行を力学的なモデルで落とし込むと、よく『倒立振子モデル』で表されることが多いです。
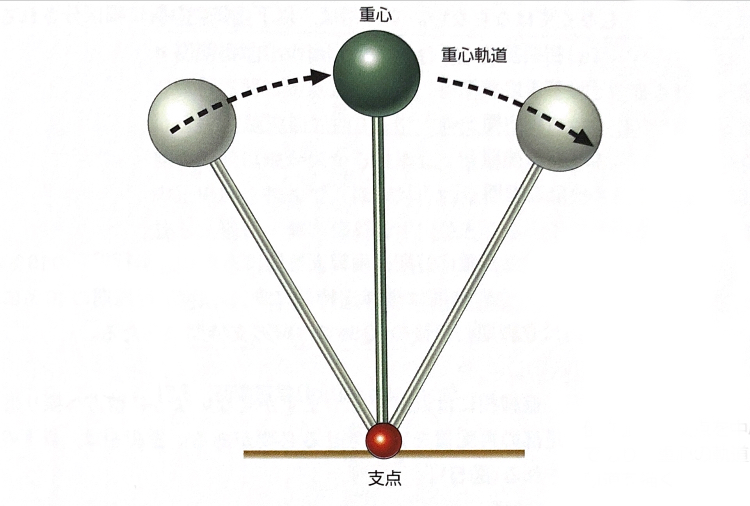
今回もこの倒立振子モデルを用いて直立二足歩行のメリットついて考えてみようと思います。重力環境化において、倒立振子の回転運動は位置エネルギーと運動エネルギーの発生によって行われるとされています。
分かりにくい場合はジェットコースターをイメージしてみましょう。
ジェットコースターは、高いところから勢いよく滑り下りてきて(位置エネルギー)、その勢いを利用してまた高いところに上がっていきます(運動エネルギー)。位置エネルギーは高さに比例しますから、重りの位置が高くなればなるほど位置エネルギーは大きくなります。
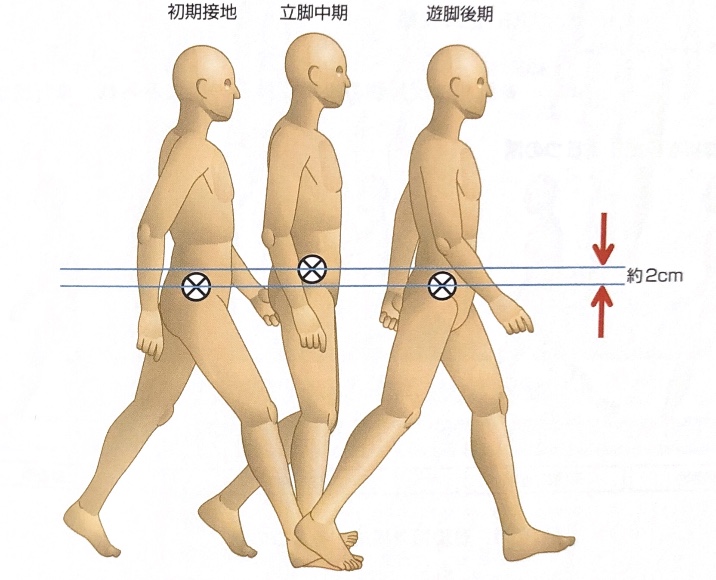
そして、重りが最も高い位置から前方へ回転していくときの力は、十分に蓄えられた位置エネルギーにより発揮されます。これを歩行に置き換えるなら、立脚中期~立脚後期がこの相にあたります。
逆に重りの位置が最も低くなった位置では速度が一番早い状態になっています。(歩行周期でいうなら立脚初期~立脚中期)
運動エネルギーは速度に比例しますから、速度が最も速くなっているこの相では、主に運動エネルギーを利用し、重心を持ち上げ立脚中期に到達します。基本的にヒトが行う直立二足歩行もこれの繰り返しにより成り立っています。
つまり、直立二足歩行とは重力を主に利用した移動様式となっており、最大のメリットとして(さあ、いよいよきたよ)
『エネルギー効率が良い』
ということが言えるのです。言い換えると…
『歩行に、過度な筋力を使って推進しているわけではない。』ということです。
実際に、直立二足歩行の消費エネルギーはチンパンジーの歩行(ナックルウォーク)の4分の1程度であるとされています。ただ、その一方で背負ったリスクが『不安定性』であり、そのリスクを背負ってまでなぜ効率化を選んだのか。
その理由は、未だ多くの謎に包まれており明確にはなっていませんが諸説として、長距離の移動に適応する必要があったことや、物を運ぶために前脚を移動手段から解放したためと言われています。(運搬説)
さて、今回はここまでにしておきましょう。次回は、この続きである直立化するために必要な骨格構造の変化とバイオメカニクスという視点から直立二足歩行を考えていこうと思います。

コメント